
Gyroscopic Instruments
Introduction
Gyroscopic instruments are of great importance in aircraft navigation because of their ability to maintain a constant spatial reference and thereby provide indication of the aircraft's attitude. The principal instruments that use the properties of the gyroscope are the directional gyro, the artificial horizon or attitude indicator and the turn and bank indicator.
Gyroscopic Properties
The gyroscope used in these instruments comprises a rotor, or wheel, spinning at high speed about an axis passing through its centre of mass and known as the spin axis.
A simple gyro rotor is illustrated in Figure, when a rotor such as that is rotating at high speed it exhibits two basic properties, known as rigidity and precession. It is these properties that are utilised to give gyroscopic instruments their unique features.

GYRO ROTOR
Rigidity
The spinning rotor of the gyro has rotational velocity and therefore, if we consider any point on the rotor, that point has angular velocity as indicated by the arrow A in Figure above. Since the rotor has mass, that angular velocity produces angular momentum, which is the product of angular velocity and mass.
As stated in Newton's First Law of Motion, any moving body tends to continue its motion in a straight line and this is known as inertia. In the case of the spinning gyroscope there is a moment of inertia about the spin axis, which tends to maintain the plane of rotation of the gyro. Consequently, the spin axis of a gyroscope will maintain a fixed direction unless acted upon by an external force. This property is known as rigidity. Another way of putting this is that the spin axis of the gyro will remain pointing toward a fixed point in space unless it is physically forced to move.
Since rigidity is the product of angular velocity and mass it follows that the rigidity of a gyroscope may be increased by increasing either its angular velocity, or its mass, or both. Increasing the speed of rotation of the rotor, or its diameter, will increase angular velocity and therefore angular momentum. The rotor diameter is constrained by the need to keep the instrument as compact as possible and so the gyro rotor is made to spin at very high speed.
Similarly, the mass of the rotor is constrained by its size limitations, but angular momentum is improved if the mass is concentrated at the rim of the rotor.
Precession
Precession is defined as the angular change in direction of the spin axis when acted upon by an applied force. Let us suppose that the axis of the gyro rotor in Figure has a force applied to it as shown in (a). Application of a force to the spin axis as shown is exactly the same as if the force had been applied at point X on the rotor. If the rotor were stationary then it, and its spin axis, would tilt as shown at Figure (b).
However, when the rotor is rotating it has not only the applied force acting upon it, but also the angular momentum previously described. The combination of the two displaces the effect of the applied force through 90º in the direction of rotation, as shown in Figure (c).
Thus, the spin axis of the gyroscope will precess as shown in Figure (d) in response to the force applied in Figure (a).
The rate at which a gyro precesses is dependent upon the magnitude of the applied force and the rigidity of the rotor. The greater the applied force, the greater the rate of precession. However, the greater the rigidity of the rotor the slower the rate of precession for a given applied force.
A gyro will continue to precess so long as the applied force is maintained, or until the applied force is in the same plane as the gyro plane of rotation, as shown in Figure (e). If the applied force is removed, precession will immediately cease.

PRECESSION
Types of Gyro
Free gyro
Clearly the rotor of the gyroscope must be contained within a supporting structure. The rotor spindle is mounted within a ring known as a gimbal and this is in turn mounted within a framework, the design of which depends upon the gyro function. All gyroscopes must have freedom for the rotor to rotate and to precess.
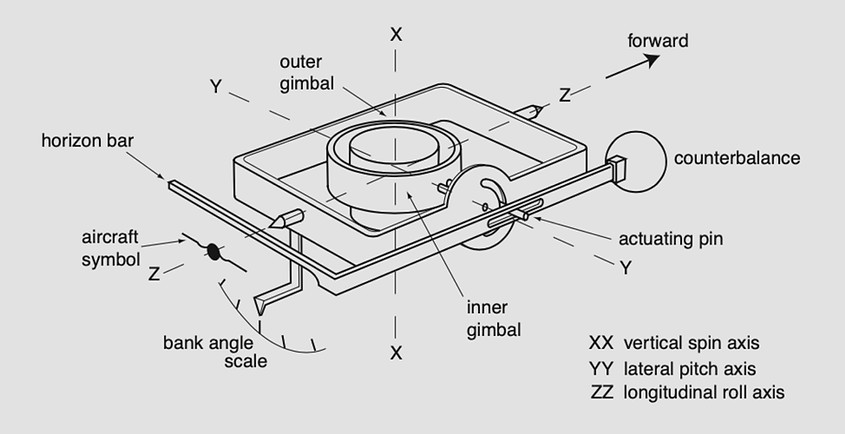
The gyroscope cannot precess about the axis of rotation, but precession may take place about either of the two axes at right angles to the plane of rotation. A gyroscope that has freedom to precess about both these axes is known as a free gyro, and is said two have two degrees of freedom of precession. Such a gyroscope is illustrated in Figure.

FREE GYRO
The number of degrees of freedom of precession of any gyroscope is the same as its number of gimbals. It will be seen that the gyro rotor spindle is mounted in bearings within a ring, or gimbal, known as the inner gimbal. This is in turn mounted in bearings that are attached to a second gimbal ring, known as the outer gimbal. Thus, the gyro rotor is free to spin about spin axis XX and it also has freedom of movement about the inner gimbal axis YY. The outer gimbal is mounted in bearings attached to the frame of the assembly and therefore has freedom of movement about the third axis, ZZ.
If the frame of the free gyro were to be fixed to the instrument panel of an aircraft, the aircraft could be pitched, rolled or even inverted and the spin axis of the spinning gyroscope would remain aligned with the same fixed point in space. In point of fact the free gyro has no practical application in aircraft, but gyroscopes having freedom of precession about two axes, known as tied gyros, are extremely useful.
Tied gyro
The aircraft instruments that employ gyros provide a fixed reference, about which aircraft movement is indicated to the pilot. The directional gyro provides the pilot with aircraft heading information and so its reference axis is the aircraft's vertical axis and the gyro rotor must be sensitive to movement about that axis and no other. The function of the attitude indicator is to provide the pilot with indications of aircraft attitude with reference to the pitch and roll axes of the aircraft and so its gyro must be sensitive to aircraft movement about these axes.
The turn indicator is required to indicate rate of turn and so it must be sensitive to aircraft movement about the vertical axis.
A gyroscope is not sensitive to movement about its spin axis, so its rotor must be maintained at right angles to the required axis for maximum sen- sitivity. Consider the situations depicted in the illustration in Figure.

GYROSCOPE SPIN AXIS ALLIGNMENT
Axis AA is the aircraft's vertical, or yaw, axis. Any movement about this axis involves a change in aircraft heading and so we require the directional gyro to be sensitive to movement about this axis. Since a gyro is not sensitive to movement about its spin axis it is clear that a gyro with its spin axis vertical (gyro D in Figure) would not be suitable, but that the spin axis of a directional gyro must be maintained horizontal.
The attitude indicator is required to indicate aircraft attitude with reference to the aircraft pitch and roll axes, BB and CC respectively in Figure. Clearly its spin axis must not be aligned with either of these aircraft axes.
Consequently gyro E would not be suitable, because its spin axis is aligned with the aircraft's pitch axis, and gyro F would not be suitable, because its spin axis is aligned with the aircraft's roll axis. Thus, the spin axis of the attitude indicator gyro must be maintained vertical as in gyro D, and not just aircraft vertical, but earth vertical.
Rate Gyro
The turn indicator is required to indicate rate of turn, that is the rate at which the aircraft is turning about its vertical axis. The turn indicator gyro must therefore be sensitive to movement about the aircraft vertical axis AA and so its spin axis must be aligned with either axis BB or CC. For practical reasons that will become apparent when we study this instrument in detail, it is aligned with the aircraft's lateral axis BB, as for gyro E. The gyro of the turn indicator is known as a rate gyro.
In each case we require the spin axis of the gyroscope to be tied to a particular direction, e.g. earth vertical or aircraft horizontal. Such a gyroscope is known as a tied gyro
Earth Gyro
A tied gyro that is controlled by the earth's gravity is known as an earth gyro; this is the case with the attitude indicator.
Another type of gyro, which is associated with the gyro- stabilised platform of an inertial navigation system, is the rate integrating gyro. This is a single degree of freedom gyro, sensing rate of movement about one axis only, which is integrated to give change of distance.
Gyroscope Drift or Wander and Gyro Topple
The spin axis of a gyroscope remains aligned with some point in space, as opposed to alignment with any earth reference such as true or magnetic north. Any deviation of a horizontally aligned spin axis from its point of reference is known as gyro drift, or wander.
Gyro drift is of two types
-
Real drift
-
Apparent drift.
Deviation of a vertically aligned spin axis from its reference is known as gyro topple.
Real drift
The gyro comprises a spinning rotor mounted in a gimbal, which is in turn pivoted to either another gimbal or a frame. If the rotor, its spindle or a gimbal is not perfectly balanced the imbalance will apply a force to the rotor. This force will cause precession, which will cause the spin axis of the gyro to deviate from its spatial reference. The same effect can arise due to friction or wear in the rotor spindle bearings. The drift due to the spatial deviation is known as real or random drift; it is usually very small and it cannot be calculated, so it is impossible to produce correction charts for real drift.
Apparent drift
Let us now consider the case of a gyroscope with its spin axis tied to horizontal, as in the case of the directional gyro. Imagine this gyro is at the true north pole, where all directions are south. The spin axis of the gyroscope has been aligned with the Greenwich meridian, 0º of longitude.
Now remember that a gyroscope alignment is really with some point in space and it is to this unknown point that the spin axis is truly pointing. The earth rotates at 15º per hour and so, assuming that our gyro is perfect and does not suffer from any real drift, after one hour its spin axis will still be aligned with the same point in space. However, to the earthbound observer it will no longer be aligned with 0º of longitude, but will appear to have drifted by 15º. This is known as apparent drift due to earth rotation.
If the same gyro were to be taken to any point on the equator and aligned with true north it would not suffer at all from apparent drift due to earth rotation, because the earth reference point and the space reference point are in alignment and remain so. Thus, the rate of apparent drift due to earth rotation varies with latitude and can be calculated, since it varies as the sine of the latitude.
Apparent drift due to earth rotation is given as = 15 x sin latitudeº/hr.

APPARENT DRIFT DUE TO EARTH ROTATION
Transport drift
Since the earth rotates about its north-south axis at 15º per hour it follows that an aircraft flying on a westerly heading, against the direction of earth rotation, will experience a greater rate of longitude change and one flying on an easterly heading a lesser rate. To an observer on the aircraft, the spin axis of a horizontally aligned gyro would appear to drift even though no change of latitude has occurred. This apparent drift is known as transport drift.
Apparent topple
A vertical axis gyro will also suffer apparent wander, which is conventionally known as topple. Suppose a vertical axis gyro is taken to the true north pole. Its spin axis will be aligned with the earth's spin axis and pointing toward some point in space. The earth reference and the space reference will remain in alignment and there will be no gyro topple.
Suppose now the same gyro were to be taken to a point on the equator and started spinning with the spin axis perpendicular to the earth's surface, i.e. earth vertical. After one hour the earth will have rotated 15º. The gyro spin axis will have maintained its spatial alignment and will appear to have toppled by 15º.
As with apparent drift, the rate of topple is dependent upon the latitude at which the gyro is located, but in this case it varies as the cosine of the latitude.
Apparent topple is given as = 15 x cos latitudeº/hr.

APPARENT TOPPLE DUE TO EARTH ROTATION
Ring laser gyro
Unlike the conventional gyroscopes, the ring laser gyro is a solid state device that does not have any moving parts.
The device is made from a block of very expensive glass, within which there is a triangular cavity of exact dimensions, filled with a suitable lasing medium, such as helium±neon. Each side of the triangular cavity is exactly
the same length and at each of the three junctions is a mirror, one of which is partially transmitting.
At the mid-point of one side of the triangular cavity is a cathode and in the other two sides an anode is positioned at exactly the same distance from the mirrors. Laser beams travelling between the cathode and each anode will take exactly the same length of time to travel exactly the same distance.
However, if the ring laser gyro is rotated about the axis perpendicular to the laser path, one laser beam will arrive at one anode slightly before the other beam arrives at the other anode, and the time difference will be pro- portional to the rate of rotation. The direction of rotation will determine which laser has the shorter distance to travel. The time difference is measured and used to produce a digital readout of rate and direction of rotation.
Ring laser gyros, although very expensive to produce, have the advantage of being much more reliable than conventional gyros, because there are no moving parts subject to wear. Also they are available for immediate use when switched on, whereas conventional gyros take some time to spin up and stabilise.

RING LASER GYRO
Gyro drives
The rotors of gyroscopic instruments must spin at high speed to give the degree of rigidity needed and the motive power for them is either pneumatic or electrical.
Pneumatic drive
Air-driven gyro rotors are typically powered from the aircraft's vacuum system, air being drawn through the instrument by an engine-driven vacuum pump that maintains approximately 4 in Hg of vacuum in the system.
A schematic diagram of a typical light aircraft vacuum system is shown in Figure.

LIGHT AIRCRAFT VACUUM SYSTEM
Pneumatically driven gyros in aircraft that operate at high altitude are usually supplied with air pressure rather than vacuum, because of the difficulty in producing the requisite vacuum in a low-pressure environment. In either case the air entering the instrument is directed onto bucket-shaped indentations in the rim of the gyro rotor, driving it as a simple turbine.
In some light aircraft the vacuum is produced by means of a venturi tube placed in the airflow. Because the device only operates in flight at speeds in excess of 100 knots and is susceptible to icing, it is unsuitable for use in aircraft where instrument flight may be required.
Electrical drive
Alternating current (a.c.) or direct current (d.c.) motors are also used to drive gyroscopic instrument rotors, using power from the aircraft electrical systems. As a general rule, a.c. motors are preferred for attitude indicators and d.c. motors for turn indicators.
Simple direction indicators are usually air-driven, but those forming part of a magnetic heading reference system, such as the slaved gyro compass, are normally driven by electric motors. In some aircraft the main panel instruments may be electrically driven and the standby instruments air driven.
Electrically powered gyros are necessary in aircraft intended for high altitude flight. Because they are capable of much higher rotational speeds than pneumatically powered instruments they offer increased stability and lighter construction.
In either case it is clear that interruption of the power supply will render the gyros unserviceable and it is important that the pilot should be imme- diately aware of this. Loss of power, whether pneumatic or electrical, will be indicated by a warning flag on the face of the instruments.
Directional Gyro (DG)
The function of the directional gyro is to indicate the aircraft heading, utilising the rigidity of a spinning gyroscope so to do. The gyro spin axis is maintained horizontal and it can be set so that it is referenced to either magnetic north or true north.
It will then hold this reference whilst the aircraft heading changes. A compass scale is attached to the outer gimbal of the gyroscope. The instrument casing, which is of course attached to the aircraft, moves around the fixed reference scale card as the aircraft changes heading. As a two-gimbal gyro, it has two degrees of freedom of precession.
Figure shows the operating principle of the directional gyro. The rotor of the directional gyro is mounted in an inner gimbal ring with its spin axis horizontal, so that it is free to rotate in the vertical plane. The inner gimbal is in turn pivoted to an outer gimbal, so that it is free to move about a horizontal axis at right angles to the spin axis. The outer gimbal is pivoted to the case of the instrument and is free to rotate about the vertical axis. The compass scale card is attached to the outer gimbal and is typically marked from 0º to 360º.
The rotor is normally driven by air drawn in through the aircraft's vacuum system and directed by a nozzle onto buckets machined in the rim of the rotor. The rotor typically rotates at about 12 000 rpm.

DIRECTIONAL GYRO PRINCIPLE OF OPERATION
Adjustment procedure
Before the start of a flight the directional gyro must be set up so that the rotor is spinning with its spin axis horizontal and the heading indication agrees with the aircraft compass reading. This is achieved with a caging mechanism and an adjustment knob on the face of the instrument.
Depressing the adjustment knob engages a caging mechanism that locks the inner gimbal in a horizontal position. It also engages a pinion with a bevel gear attached to the outer gimbal of the instrument. Rotating the adjustment knob will rotate the outer gimbal and its attached compass card and this is done until the lubber line on the face of the instrument is aligned with the required heading.
Once this is satisfactory the adjustment knob is pulled out to disengage the caging mechanism and bevel gear, leaving the gyro spin axis free to maintain its fixed reference. This adjustment can also be made in flight, but must be done with the aircraft flying straight and level. The instrument should also be caged during violent manoeuvres to prevent the gyro from toppling.
Erection system
During a change of heading an aircraft is turning about its vertical, or yaw, axis. Whilst it is doing so the aircraft is, of course, banked and so the spin axis of the directional gyro must also be tilted to keep it aircraft horizontal. As we know, to move the spin axis of a gyro away from its fixed reference it is necessary to precess the gyro, and this is achieved through the design of the nozzle that directs air onto the rim of the rotor.
In later designs of air-driven directional gyros the air from the rotor is exhausted onto a wedge attached to the outer gimbal, as shown in Figure.
Whilst the spin axis of the rotor remains aircraft horizontal the spin axis and the outer gimbal are mutually perpendicular and the exhaust air strikes both sides of the wedge equally, as seen in Figure.

ROTOR ERRECTION SYSTEM - DERECTIONAL GYRO
When the aircraft begins to bank in a turn the outer gimbal banks with it and the rotor axis is no longer at right angles to the outer gimbal.
Exhaust air now strikes one side of the wedge more than the other. This applies a force to the outer gimbal that is tending to rotate it about the vertical axis, which is the same as applying a force to one side of the gyro rotor.
That force is precessed by the rotor through 90º in the direction of rotation, tilting it to keep its spin axis aircraft horizontal. Any tendency of the rotor to move from the aircraft horizontal reference will be corrected by this device.
Earlier DGs used a split, or bifurcated, air nozzle to achieve the same result.
Gimbal error
Gimbal error is when the gimbals of a gyroscope are not mutually perpendicular and the gyroscope itself is displaced. Briefly, the reason for these errors is because the spin axis of the DG is aligned with east-west on the instrument compass card.
Thus, with the DG properly set, the rotor spin axis will be at right angles to the aircraft longitudinal axis (and therefore the outer gimbal) when the aircraft is on an east or west heading and aligned with it on a north or south heading. On these headings the DG will only suffer gimbal error if the aircraft is pitched and rolled simultaneously. On other headings it may occur during either pitch or roll attitude changes.
The effect of gimbal error is that the instrument will give a false heading indi- cation whilst the manoeuvre is in progress, but it will normally indicate correctly once the aircraft is returned to straight and level flight.
Drift compensation
Clearly a heading indicator that was incapable of maintaining an accurate heading indication would be of no use and it will come as no surprise to learn that the directional gyro contains a compensation device.
This is illustrated in Figure. Attached to the inner gimbal of the gyro is a threaded spindle with a nut attached. The gimbal is manufactured with a slight imbalance such that it is perfectly balanced with the nut, known as a latitude nut, in approximately a mid-position on its spindle.
If the nut is screwed outward on the spindle it will apply a downward force to the gyro rotor, which will be precessed 90º in the direction of rotation to cause the gyroscope to precess about the vertical axis. Screwing the latitude nut inward will allow the slight imbalance of the inner gimbal to apply a force in the opposite direction.

LATITUDE NUT
Comparison with magnetic compass
The latitude nut of the directional gyro provides compensation only at the latitude for which it is set. This setting can only properly be made with the instrument in a workshop.
If the instrument is transported north or south of the set latitude it will begin to suffer from apparent drift due to earth's rotation, and the further it is moved the greater will be its error rate.
Consequently, the DG must always be referenced to the aircraft magnetic compass and this can be readily done in level flight or on the ground with the adjustment knob.
An advantage of the directional gyro is that it does not suffer the turning and acceleration errors of the magnetic compass and so its heading information tends to be more accurate, especially in a steady level turn.
In the event of failure of the gyroscope the rotor will almost inevitably topple and its indication will be useless. Under these circumstances a warning flag will appear, to obscure the display.
Effect of friction
Friction or wear in the bearings of the gyro rotor will cause real, or random, drift. In a properly maintained DG this should be insignificant.
Attitude indicator (artificial horizon)
The attitude indicator uses a vertical earth gyro that has freedom of movement about all three axes. The gyro spin axis is maintained earth vertical, using the force of gravity to keep it aligned with the earth's centre.
Attitude indicators may be pneumatically or electrically driven. The purpose of the instrument is to provide the pilot with an indication of the aircraft attitude in both pitch and roll.
Construction and principle of operation
Figure illustrates the principle of operation of a pneumatic attitude indicator. The vertical gyro rotates at about 15000 rpm and is contained within an inner gimbal. It is maintained earth vertical, thus spinning in the earth horizontal plane, by utilising gravity.
The inner gimbal is pivoted to an outer gimbal with the pivot axis lying parallel to the aircraft lateral axis.
The outer gimbal is in turn pivoted to the instrument casing with the pivot axis lying parallel to the aircraft longitudinal axis.
Since the instrument casing is attached to the airframe it follows that any change in aircraft attitude must take place about the vertically referenced gyro. Thus, if the pitch attitude changes, the outer gimbal will pitch up or down relative to the gyro spin axis. If the roll attitude changes the outer gimbal will roll left or right relative to the gyro spin axis.
Attached to the outer gimbal is a sky plate, which is viewed through the face of the instrument. The upper half of the plate is typically coloured pale blue to represent the sky and the lower half black to represent the earth, the two divided horizontally to represent the earth's surface.
Also attached to the outer gimbal by a pivoted spindle is a bar, which extends across the front of the sky plate parallel to the dividing line. This bar, known as the horizon bar, is driven by a spindle attached to the inner gimbal. Printed on, or attached to, the glass cover of the instrument is a fixed symbol representing the aircraft.
ATTITUDE INDICATOR
With the aircraft flying straight and level, the gyro spin axis will be perpendicular to both the lateral and the longitudinal aircraft axes and the horizon bar and aircraft symbol will appear in the mid-position, as shown in Figure (a).
If the aircraft is pitched nose-up, the outer gimbal will be pitched up with it, raising the front of the gimbal relative to the gyro spin axis, which remains earth vertical.
Because the horizon bar is pivoted to the forward end of the outer gimbal, that end of the bar will rise and pivot about the actuating pin protruding from the inner gimbal. This causes the horizon bar to move down relative to the aircraft symbol, indicating a climb. In a descent the reverse happens and the horizon bar moves up relative to the aircraft symbol. These indications are represented in Figures (b) and (c).
When the aircraft is rolled to left or right the bank indication is given by the position of the horizon bar relative to the aircraft symbol. This is because the aircraft symbol, on the glass face of the instrument, will have rolled with the aircraft about the vertically referenced gyro spin axis, which has maintained the outer gimbal, and therefore the horizon bar, earth horizontal.
Typically, a pointer attached to the outer gimbal will indicate bank angle against a scale printed on the glass face of the instrument. Figure (d) shows the indication with the aircraft banked to the left.
Some attitude indicators incorporate an adjustment knob that can be used to raise or lower the aircraft symbol, so that it may be positioned against the horizon bar when the aircraft is flying straight and level, but with the fuselage pitched up or down. This is particularly useful in helicopters, which frequently fly level in a pitched attitude.

ROLL INDICATIONS
Erection mechanism
The vertical gyro of the pneumatic attitude indicator is maintained earth vertical by means of an erection unit beneath the inner gimbal. The air that has driven the gyro rotor is exhausted through four equally spaced ports machined in the sides of the unit, two in the lateral (athwartships) axis and two in the longitudinal (fore and aft) axis. When the gyro spin axis is earth vertical, each port is partly covered by a freely pivoted pendulous vane and the exhaust air escapes equally from each port, as illustrated in Figure (a).
If the spin axis, and with it the inner gimbal, tilts away from earth vertical, the vanes, because they are pendulous, will continue to hang vertically. Suppose the gyro has tilted as shown in Figure (b). On one side of the erection unit the vane has fully uncovered its port, whilst on the other the vane will have fully covered its port. The front and rear vanes will not have moved relative to their ports, and so these ports will remain half open.
Consequently, air will be exhausted from one side of the erection unit only and there will be a reaction force, in the opposite direction, applied to the gyro rotor. The gyro will precess this force 90º in the direction of rotation, which will serve to re-erect the gyroscope. When it is once again earth vertical, all four ports will be equally uncovered and the erection forces will once again be in balance.

ERECTION SYSTEM - PNEUMATIC ATTITUDE INDICATOR
Acceleration errors
The erection mechanism of the pneumatic attitude indicator is the cause of false attitude indications during aircraft acceleration. When the aircraft accelerates in a level attitude, such as during the take-off run, the pendulous vanes tend to swing rearward due to inertia.
This does not affect the front and rear vanes. However, by referring to Figure above it will be seen that this will result in the right side port becoming uncovered more than the left side port. Because the gyro rotor spins anti-clockwise when viewed from above, the reaction to this sideways imbalance of force will apply a force to the rotor which, when precessed, will tilt the rotor to give a false climb indication.
The erection unit itself is also pendulous, suspended as it is beneath the gyro rotor. Consequently, during a rapid acceleration inertia tends to swing it rearward, thereby applying a rearward force to the rotor. This is precessed 90º in the anticlockwise direction of rotation to tilt the rotor to the right, giving a false indication of right bank.
Thus, the overall effect of aircraft acceleration is to give a false indication of a climbing right turn.
Because of these errors, pneumatic attitude indicators are usually only fitted to light and general aviation aircraft of low performance which have limited electrical power available. Wherever the electrical power supplies are adequate it is usual to fit electrically driven attitude indicators, which are less susceptible to acceleration error.
Turning errors
During a turn, centrifugal force acts to swing the fore and aft pendulous vanes outward from the centre of the turn. The resultant reaction force on the erection unit, when precessed, tends to tilt the gyro to give a false indication of bank.
Furthermore, the pendulosity of the erection unit, suspended beneath the inner gimbal, applies a sideways force to the gyro that, when precessed, gives a false indication of pitch. In general the turning errors are less serious than the acceleration error.
Electrically driven Attitude Indicator
The principle of operation of the electrically driven attitude indicator is essentially the same as that of the pneumatic instrument. The gyro unit is an electric motor that rotates at considerably higher speed, typically around 22 000 rpm, and therefore has greater rigidity.
The erection system is quite different, however. Instead of the pendulous system of the pneumatic type, it employs two torque motors mounted on the outer gimbal and operated by mercury-filled levelling switches. Figure is a diagram showing the operating principle of the system.
The torque motors are a.c. induction machines with their stators mounted on the outer gimbal in line with its lateral and longitudinal axes. When current is supplied to the stator a rotating magnetic field is set up, which tends to rotate the rotor surrounding the stator.
This tendency is opposed by the rigidity of the gyroscope, resulting in a torque reaction acting about the axis of the motor, and therefore about the pitch or roll axis of the outer gimbal.
The mercury-filled levelling switches are small tubes partly filled with mercury, mounted on the inner gimbal of the gyroscope. When the gyroscope is running at normal speed an electrical current is supplied to a central contact in the tube. Contacts at either end of the tube are connected to the associated torque motor stator field windings.
Whilst the inner gimbal remains earth horizontal the mercury in the switch is centralised and there is no conducting path between the central, supply contact and either of the end, output contacts. If the switch is tilted, due to the outer gimbal tilting, the mercury runs to one end of the tube and connects the electrical supply to one output. The direction of tilt will determine the direction of the torque applied by the appropriate torque motor.

ERECTION SYSTEM - ELECTRICAL ATTITUDE INDICATOR
Let us suppose that the inner gimbal has begun to topple rearward, that is anti-clockwise about the pitch axis as viewed in Figure above.
The roll levelling switch, aligned with the pitch axis of the instrument, will not be affected and its mercury will remain centralised. The pitch levelling switch, aligned with the instrument roll axis, will be tilted and its mercury will run to the rear end of the tube, completing the electrical supply circuit to the pitch torque motor and causing it to apply a torque force anti-clockwise about the roll axis, as viewed in Figure.
The torque produced will be applied to the vertical gyro and precessed through 90º in the direction of rotation. This will result in a clockwise torque force about the longitudinal axis, as viewed in Figure, acting upon the gyro to re-erect it. Once it is restored to earth vertical the levelling switches will both be in the neutral (mercury cen- tralised) positioned and supply to the torque motors isolated.
Acceleration and turning errors
The mercury switches are susceptible to acceleration, during which inertia will force the mercury to one end of the tube and make the contacts to supply power to one or both torque motors. This would, of course, lead to false indications similar to those described for the pneumatic instrument.
However, it is a relatively simple matter to incorporate a cut-out system in the electrical circuitry, which will detect acceleration and distinguish it from topple. This will cut off supply to the switches during detected acceleration
and prevent false climb or bank indication.
Warning indications
In the event of failure of the vacuum system the pneumatic attitude indicator will normally display a warning flag on the face of the instrument. The electrical attitude indicator typically displays an OFF flag when its power supply is disconnected.
Erection speed
Pneumatic attitude indicators typically have an erection speed of about 8º per minute, which means that they usually take in excess of 5 minutes to erect from start-up.
Electrical attitude indicators have erection rates, of the order of 3º to 5º per minute.
Many have fast erection systems for use during start-up, giving an erection time of less than one minute. Some pneumatic instruments are equipped with a caging system, similar to that described for the directional gyro, which shortens the start-up erection process.
Turn and bank indicator (rate gyro)
The purpose of the turn and bank indicator is to measure and display the aircraft rate of turn and to indicate whether the aircraft is correctly banked for a coordinated turn with no slip or skid.
To measure the rate of turn, i.e. rate of movement about the yaw axis, the instrument employs a rate gyro that is sensitive to movement about the aircraft yaw axis only. The bank indication is a separate device using a combination of gravitational and centrifugal force.
Rate gyroscope
Since the rate gyroscope is required to be sensitive to movement about the yaw axis it follows that its spin axis must be perpendicular to that axis, i.e. horizontal. The gyro rotor is mounted in a gimbal with its spin axis aligned with the lateral (athwartships) axis of the aircraft.
The single gimbal is pivoted fore and aft in the instrument casing, in line with the aircraft longitudinal axis. The gyro rotor spins up and away from the pilot. The general arrangement showing the principle of operation is shown in Figure.
It will be seen that the gyro has freedom of movement about two axes only, the lateral spin axis and the longitudinal precession axis. When the aircraft yaws about the vertical axis this applies a force to the gyro rotor at the front, in line with the spin axis.

TURN AND BANK INDICATOR
Let us suppose that the aircraft is turning to the left. This applies a torque force about the yaw axis in an anti-clockwise direction viewed from above. This is as though a linear force were applied to the front of the gyro rotor on the right side in line with the spin axis, as illustrated in Figure.
The gyro will precess this force 90º in the direction of rotation, so that it becomes torque acting in a clockwise direction about the longitudinal axis, precessing the gyro so that the gimbal begins to tilt to the right. The extent to which the gimbal tilts is limited by a spring connecting the gimbal to the instrument casing. As the spring is stretched it exerts a force on the gimbal opposing the precession. When the two are in balance the gimbal is held at a tilt angle that is proportional to the rate of turn, because the precession is equal to the rate of turn and the angular momentum of the gyroscope.
Thus, the greater the rate of turn, the greater the tilt of the gimbal. The gimbal actuates a pointer, which moves against a calibrated scale on the face of the instrument to indicate rate of turn. The actuation is such that when the gimbal tilts to the right the pointer moves to the left and vice versa.
The speed of rotation of the turn indicator gyro is relatively low, typically about 4500 rpm. It is critical that its speed is maintained constant, since this is a vital factor in ensuring that precession remains constant relative to rate of
turn.
A warning flag will appear on the face of the instrument when the gyro rotational speed is outside limits.
Rate of turn is classified numerically, where rate 1 equals 180º per minute, rate 2 equals 360º per minute, rate 3 equals 540º per minute and rate 4 equals 720º per minute.
These may also be quoted as 3º, 6º, 9º and 12º per second, respectively. An aircraft maintaining a rate 1 turn for 2 minutes will therefore turn through 360º.
Bank indication
The bank indication given by the turn and bank indicator displays to the pilot whether or not the aircraft is correctly banked for the turn being made. If the aircraft is banked excessively it will tend to slip toward the centre of the turn, whereas if it is underbanked it will skid outwards, away from the centre of the turn. Hence the name by which this instrument was once commonly known, the turn and slip indicator.
The display is provided by a device quite separate from the rate gyroscope of the turn indicator, and typically comprises a curved glass tube filled with liquid and containing a ball.
When the aircraft is in level flight, gravity ensures that the ball lies in the centre of the curved tube, as shown in Figure (a).
When the pilot is making a properly coordinated banked turn the glass tube, which is attached to the instrument, will be banked with the aircraft and the resultant of centrifugal force and gravitational force will keep the ball in the centre, as shown at Figure (b).
Suppose now that the aircraft is turning, but that the bank angle is greater than it should be, i.e. the aircraft is overbanked. The centrifugal force acting on the ball is less than the gravitational force and the ball falls into the lower part of the tube, as shown in Figure (c).
This indicates to the pilot that the aircraft is slipping into the turn.
If the aircraft is underbanked the centrifugal force acting on the ball is greater than the gravitational force and the ball will be moved into the upper part of the tube, indicating that the aircraft is skidding out of the turn. This is shown in Figure (d).
Figure (e) shows the turn and bank indications during a properly co-ordinated 2 minute (rate 1) standard turn.

TURN AND BANK INDICATIONS
Turn co-ordinator
Light aircraft are often fitted with a variation of the turn and bank indicator, known as a turn coordinator. The purpose of the instrument is to present the pilot with a display that makes coordination of bank angle and turn rate as simple as possible.
The display is as shown in Figure. When the pilot banks the aircraft to initiate a turn the aircraft symbol on the display banks in the appropriate direction, since it is actuated by the gyro precession exactly as previously described. Provided that the aircraft symbol is aligned with the left or right bank indication on the display, and the ball is in the centre, the aircraft will be making a properly banked rate 1 (2-minute) turn.
The main constructional difference between this and the turn and bank indicator is that the longitudinal axis of the gyro gimbal is inclined at 30º to the horizontal, so that the gyro will respond to banking as well as turning input force.
The movement of the gimbal ring of all indicators is damped to control the rate of precession. Among other effects, this will limit the instrument bank indication when turning during ground taxiing.
